Decentralized data storage is a distributed computing paradigm that allows users to store and retrieve data in a decentralized manner, without the need for a central authority or coordinator. This approach has the potential to offer a number of benefits compared to traditional, centralized storage systems, such as improved reliability, security, and scalability.
In order to provide these benefits, decentralized storage systems rely on a variety of techniques and algorithms to store, manage, and retrieve data. In this article, we will provide an overview of these techniques and algorithms, including replication, erasure coding, distributed hash tables, and consensus protocols. We will also discuss the trade-offs and considerations involved in choosing the right approach for decentralized storage.
After publishing an article in August 2022 on How Decentralized Storage is Transforming Data Management, I decided a more technical article was also necessary.
By understanding the technicalities of decentralized storage, we can gain a deeper appreciation for the design and operation of these systems, and how they can be used to solve real-world problems.
Table Of Contents
- Distributed Systems
- Data Distribution Algorithms
- Consensus Protocols
- Fault Tolerance Algorithms
- Distributed Database Algorithms
- Distributed File System Algorithms
- Synchronization Algorithms
- Coordination Algorithms
- Resource Management Algorithms
- Communication Protocols
- Network Routing Algorithms
Distributed Systems
Distributed systems are computer systems that consist of multiple interconnected nodes that work together to perform a common task. These nodes can be located in the same physical location or dispersed across different locations, and communicate with each other over a network.
Distributed systems offer several benefits over traditional centralized systems, including increased reliability, scalability, and performance. They can also be more flexible and adaptable, as the nodes in the system can be added or removed as needed.
However, distributed systems also introduce new challenges and complexities, such as the need to coordinate the actions of the nodes, manage data consistency and integrity, and ensure fault tolerance. To address these challenges, distributed systems rely on a variety of algorithms and protocols, such as consensus algorithms, resource management algorithms, and distributed data structures.
Data Distribution Algorithms
Erasure Coding
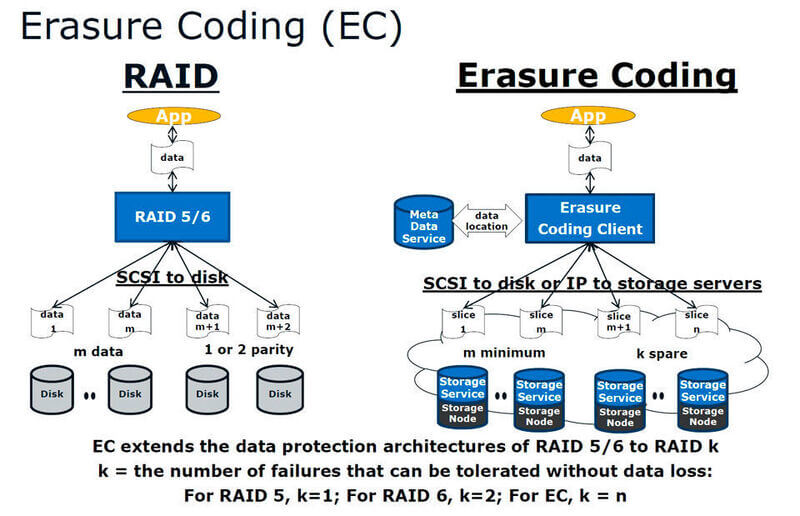
Erasure coding is a technique for storing data in a redundant manner, such that the original data can be reconstructed from a subset of the stored data. This is done by adding redundant information to the data, in the form of extra “parity” data. If some of the stored data is lost or becomes unavailable, the original data can be reconstructed using the remaining data and the parity data.
Erasure coding allows for more efficient storage compared to simple replication, as it requires the storage of less data overall. For example, if data is replicated three times, three copies of the data must be stored, which can be inefficient in terms of storage space. On the other hand, if data is encoded using an erasure code with a 2:1 ratio, only two copies of the data and one copy of the parity data need to be stored, which is more space-efficient.
Erasure coding is often used in decentralized storage systems to ensure the durability and availability of data. It can be implemented using various mathematical techniques, such as finite field arithmetic or polynomial interpolation.
Replication
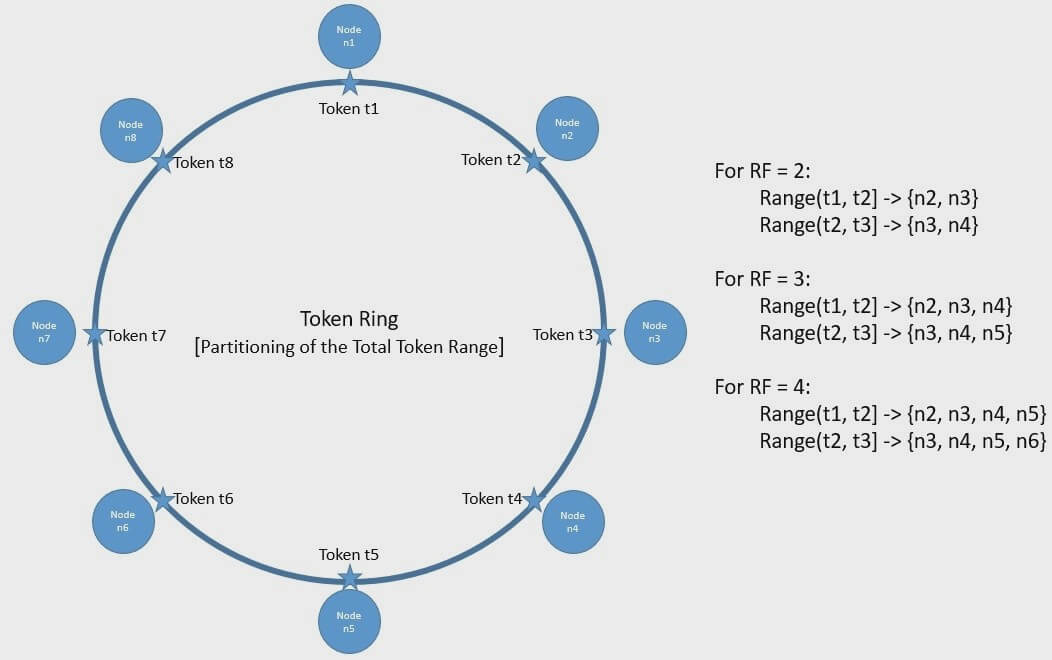
Replication is a technique used to increase the availability and durability of data in a distributed system. In a replication system, multiple copies of data are stored on different nodes in the system, so that if one copy becomes unavailable or lost, the data can still be accessed from one of the other copies.
There are several different algorithms that can be used to implement replication in a distributed system. These algorithms can differ in terms of the level of consistency they provide, the performance and overhead they incur, and the fault tolerance they offer.
Some common types of replication algorithms include:
- Full replication: Every node in the system stores a complete copy of the data.
- Partial replication: Only a subset of the nodes in the system store copies of the data.
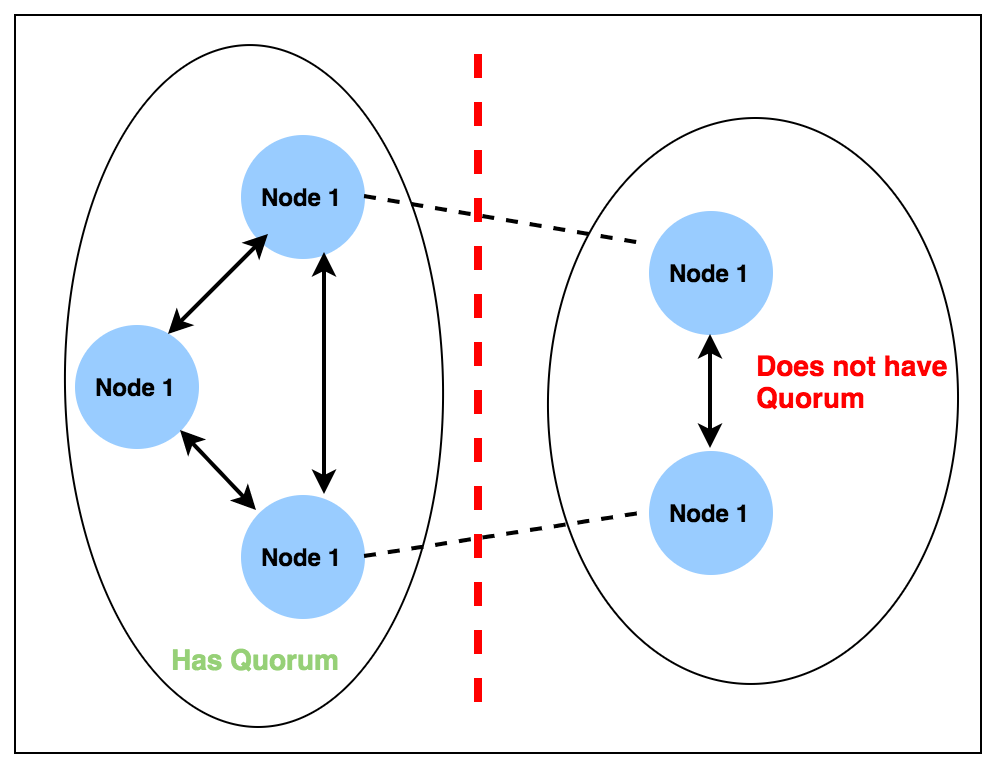
- Quorum-based replication: A minimum number of copies of the data must be available in order for it to be considered “live.”
Gossip protocols
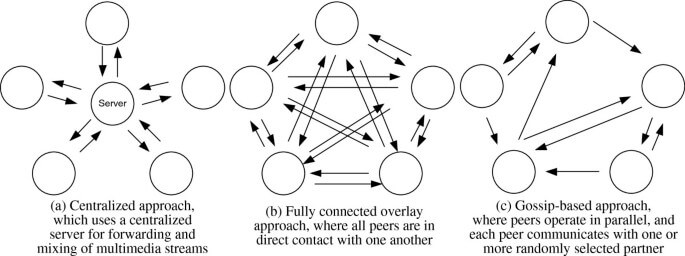
Gossip protocols are distributed protocols that allow nodes in a decentralized system to communicate and exchange information with each other, without the need for a central coordinator. In a gossip protocol, nodes periodically exchange small pieces of information, or “gossip,” with their neighbors in the network. Over time, this gossip spreads throughout the network and eventually reaches all nodes, allowing them to stay informed about the state of the system.
Gossip protocols can be used for a variety of tasks in decentralized systems, such as disseminating information about the state of the system, detecting and repairing errors, and maintaining consistency. They are often used in distributed systems that require high availability and fault tolerance, as they are relatively simple to implement and can operate effectively in the presence of failures or network disruptions.
Distributed Hash Tables (DHTs)
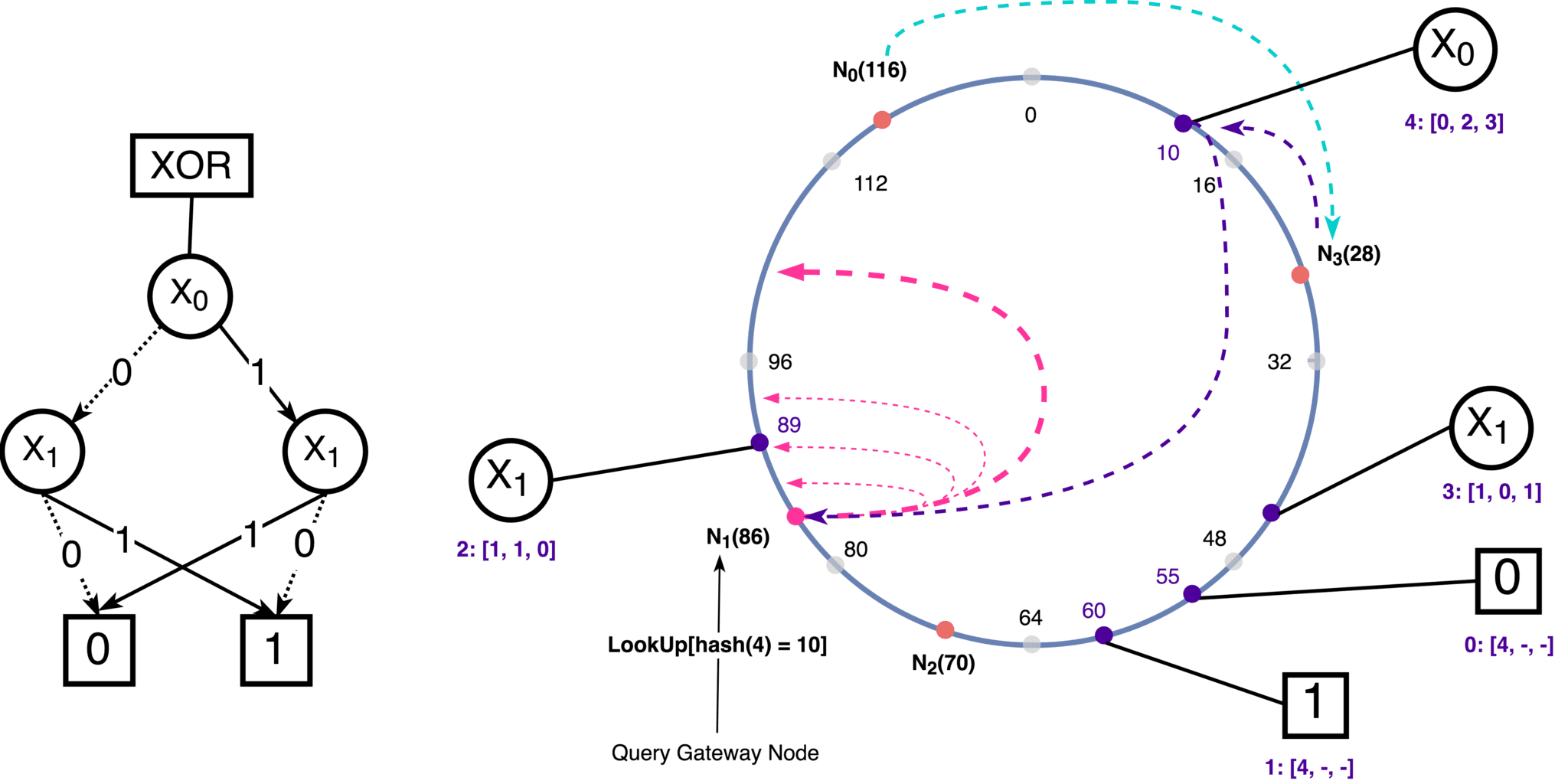
Distributed hash tables (DHTs) are a type of distributed data structure that allows nodes in a decentralized system to store and retrieve data using a key-value store. DHTs use a hash function to map keys to nodes in the system, and data is stored on the nodes responsible for the corresponding keys.
DHTs have several key features that make them useful for decentralized storage systems:
- Efficiency: DHTs can provide efficient data retrieval, as keys can be quickly mapped to the nodes responsible for storing the corresponding data.
- Scalability: DHTs can scale well as the number of nodes in the system increases, as the keyspace can be partitioned among the nodes in a balanced manner.
- Resilience: DHTs can be resistant to failures, as data can still be accessed if some nodes become unavailable.
DHTs are used in a variety of decentralized systems, including distributed file systems, peer-to-peer networks, and decentralized storage systems.
Consensus Protocols
Consensus protocols are algorithms that allow nodes in a decentralized system to reach agreement on a single value or decision. These algorithms are used to ensure the consistency and integrity of data in a distributed system, even in the presence of failures or network disruptions.
There are several different types of consensus protocols, including:
Paxos Algorithms
The Paxos algorithms are a family of consensus protocols developed by computer scientist Leslie Lamport. They allow nodes in a distributed system to reach agreement on a single value, even in the presence of failures or network disruptions. There are several different variations of Paxos, including the Basic Paxos algorithm and the Multi-Paxos algorithm.
Raft Algorithm
The Raft algorithm is a consensus protocol that was developed as an alternative to Paxos. It is designed to be easier to understand and implement than Paxos, and is often used in distributed systems that require high availability and fault tolerance.
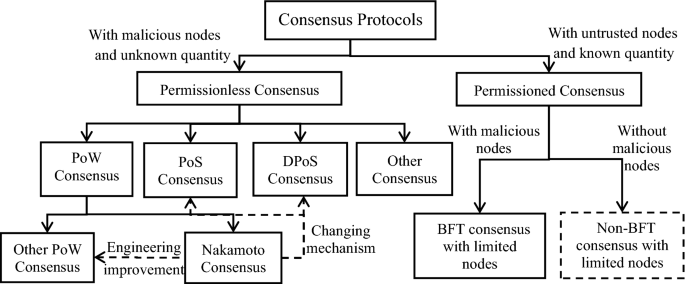
Byzantine Fault Tolerance (BFT) Protocols
Byzantine fault tolerance (BFT) protocols are a class of consensus protocols that are designed to tolerate malicious behavior by some of the nodes in the system. These protocols use complex cryptographic techniques to ensure the integrity of the system, and are often used in mission-critical systems that require high security.
Consensus protocols play a critical role in decentralized storage systems, as they ensure the consistency and integrity of the data stored in the system. They also help to ensure the reliability and fault tolerance of the system, as they allow the system to recover from errors and continue to operate correctly in the presence of failures or network disruptions.
### Paxos algorithms
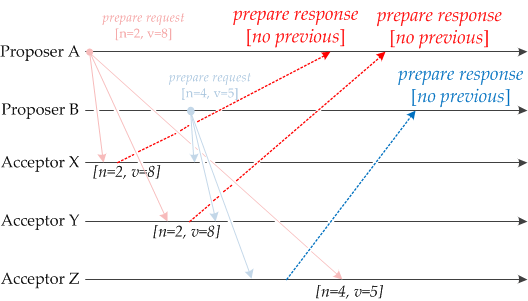
The Paxos algorithms are a family of consensus protocols developed by computer scientist Leslie Lamport. They allow nodes in a distributed system to reach agreement on a single value, even in the presence of failures or network disruptions.
There are several different variations of Paxos, including the Basic Paxos algorithm and the Multi-Paxos algorithm. The basic idea behind Paxos is to use a series of messages and voting to reach agreement among the nodes in the system.
In the Basic Paxos algorithm, nodes in the system take turns proposing values and voting on them. If a majority of nodes vote for a particular value, it is considered the agreed-upon value. If a node fails or becomes unavailable, the algorithm can still reach agreement by allowing other nodes to take its place.
The Multi-Paxos algorithm is a variant of the Basic Paxos algorithm that allows multiple values to be proposed and agreed upon in parallel. This can improve the performance and scalability of the system, as it allows multiple decisions to be made simultaneously.
Paxos algorithms are widely used in distributed systems that require high availability and fault tolerance, such as distributed databases, file systems, and messaging systems. They are known for their reliability and efficiency, although they can be somewhat complex to understand and implement.
Raft algorithm
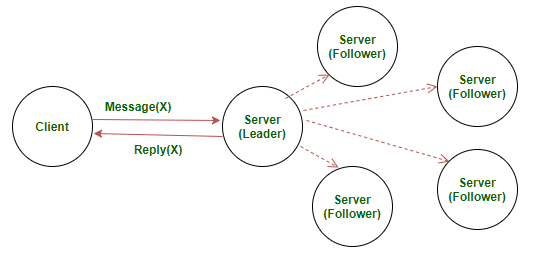
The Raft algorithm is a consensus protocol that was developed as an alternative to the Paxos algorithms. It is designed to be easier to understand and implement than Paxos, and is often used in distributed systems that require high availability and fault tolerance.
Like Paxos, the Raft algorithm allows nodes in a distributed system to reach agreement on a single value, even in the presence of failures or network disruptions. It does this by using a series of messages and voting to reach consensus among the nodes in the system.
One key difference between Raft and Paxos is that Raft divides the nodes in the system into distinct roles, including leaders and followers. The leader node is responsible for proposing values and collecting votes, while the follower nodes vote on the proposed values and apply them to their local state. This division of roles can make Raft easier to understand and implement compared to Paxos.
Raft is also designed to be more fault-tolerant than Paxos, as it allows nodes to recover from failures more quickly and automatically. This can make it a good choice for distributed systems that require high availability and reliability.
Byzantine fault tolerance (BFT) protocols
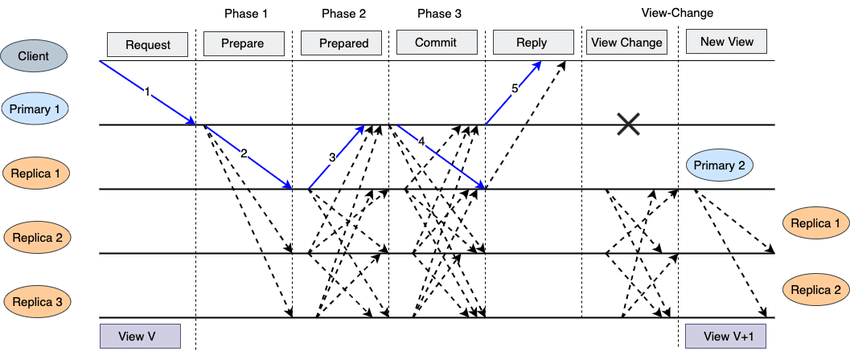
Byzantine fault tolerance (BFT) protocols are a class of consensus protocols that are designed to tolerate malicious behavior by some of the nodes in the system. These protocols are named after the “Byzantine generals problem,” which refers to the challenge of achieving consensus among a group of nodes that may be unreliable or untrusted.
BFT protocols use complex cryptographic techniques to ensure the integrity of the system, even in the presence of malicious nodes. They are often used in mission-critical systems that require high security and reliability, such as military systems and financial systems.
There are several different types of BFT protocols, including practical BFT (PBFT) and proof-of-stake (PoS) protocols. PBFT protocols use a combination of messages and voting to reach consensus, and can tolerate up to a third of the nodes in the system behaving maliciously. PoS protocols use cryptographic signatures and economic incentives to ensure the integrity of the system, and can tolerate a larger fraction of malicious nodes.
BFT protocols are more complex and resource-intensive than other types of consensus protocols, such as the Paxos algorithms and the Raft algorithm. However, they offer a high level of security and reliability, making them a good choice for systems that require strong guarantees against Byzantine failures.
Fault Tolerance Algorithms
Fault tolerance algorithms are techniques designed to ensure that a system continues to operate properly even in the presence of failures. These algorithms are essential in distributed systems, where failure of one or more components is expected.
### Checkpointing
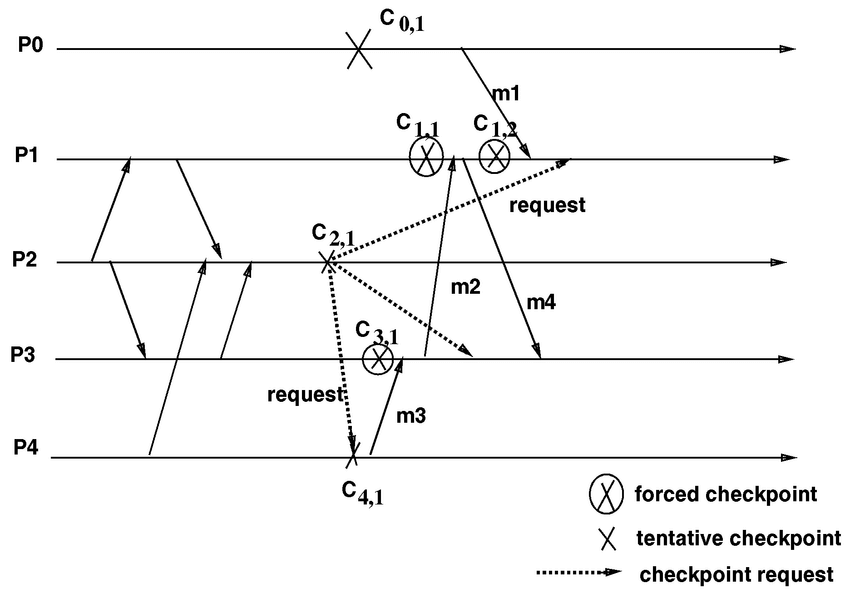
A checkpointing algorithm is a type of fault tolerance algorithm that is used to recover from failures in a distributed system. It works by periodically saving the state of the system to a stable storage location, so that the system can be restored to a known good state in the event of a failure.
The basic idea behind checkpointing is that if a node in the system fails, the system can recover by rolling back to the last known good state and replaying any updates that occurred after that state. This can help to minimize downtime and data loss in the event of a failure.
There are several different types of checkpointing algorithms, including periodic checkpointing, incremental checkpointing, and coordinated checkpointing. Each of these approaches has its own trade-offs in terms of overhead, recovery time, and data loss.
Checkpointing algorithms are often used in distributed systems that require high availability and fault tolerance, such as distributed databases and distributed file systems. They can be an effective way to ensure the reliability and consistency of the system, although they may have some overhead and complexity.
Rollback algorithms
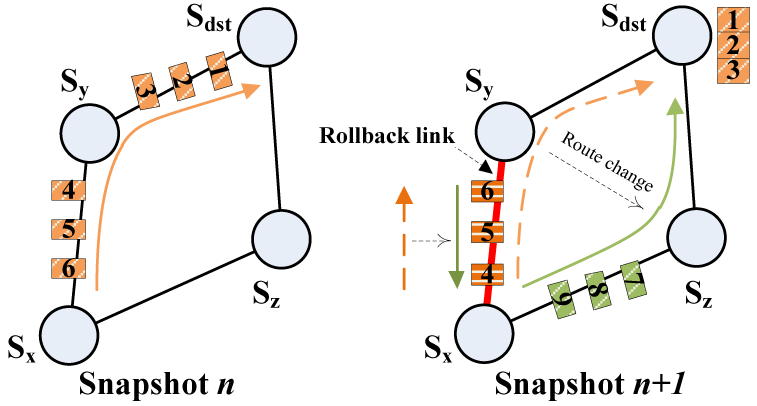
Rollback algorithms are a type of fault tolerance algorithm that is used to recover from failures in a distributed system. They work by rolling back the system to a known good state in the event of a failure, and then replaying any updates that occurred after that state to bring the system up to date.
Rollback algorithms are similar to checkpointing algorithms, in that they both involve saving the state of the system to a stable storage location and using that state to recover from failures. However, rollback algorithms typically involve rolling back the entire system to a previous state, rather than just a single node or component.
There are several different types of rollback algorithms, including snapshot rollback, version rollback, and transaction rollback. Each of these approaches has its own trade-offs in terms of overhead, recovery time, and data loss.
Rollback algorithms are often used in distributed systems that require high availability and fault tolerance, such as distributed databases and distributed file systems. They can be an effective way to ensure the reliability and consistency of the system, although they may have some overhead and complexity.
Quorum-based Algorithms
Quorum-based algorithms are designed to maintain consistency and reliability in distributed systems. A quorum is a subset of nodes that must agree on a specific decision or action for it to be considered valid. The quorum-based approach ensures that a certain number of nodes, often a majority, agree on any given operation before it is committed. This technique helps in achieving strong consistency by requiring that a quorum of nodes participate in the decision-making process, thereby ensuring that the data remains consistent across the system.
Key points of quorum-based algorithms:
- Consistency: Ensures that all nodes see the same data at the same time by requiring a quorum of nodes to agree on changes.
- Fault Tolerance: Enhances reliability by continuing to operate correctly even if some nodes fail, as long as a quorum is available to agree on actions.
- Implementation: Commonly implemented in various distributed systems and databases using techniques like the Raft consensus algorithm, which is used in RabbitMQ quorum queues to maintain durability and order.
Error Masking and Reconfiguration
Error masking and reconfiguration are techniques used to ensure that a system can continue to function correctly even in the presence of faults. These techniques employ redundancy in time and space to handle errors and dynamically reconfigure the system to bypass failed components.
Key points of error masking and reconfiguration:
- Error Masking: Uses redundancy to hide the presence of faults. For example, multiple copies of data or processes are maintained so that if one fails, others can take over without interrupting the system’s operation.
- Reconfiguration: Involves dynamically changing the system’s configuration to isolate and bypass faulty components. This can include rerouting tasks, reallocating resources, or shifting workloads to healthy parts of the system.
- Techniques: May use techniques such as time redundancy (re-executing tasks) and space redundancy (using multiple hardware units) to achieve fault tolerance.
Distributed Database Algorithms
Distributed database algorithms are designed to manage and process data across multiple nodes in a distributed database system. These algorithms ensure data consistency, availability, fault tolerance, and efficient query processing.
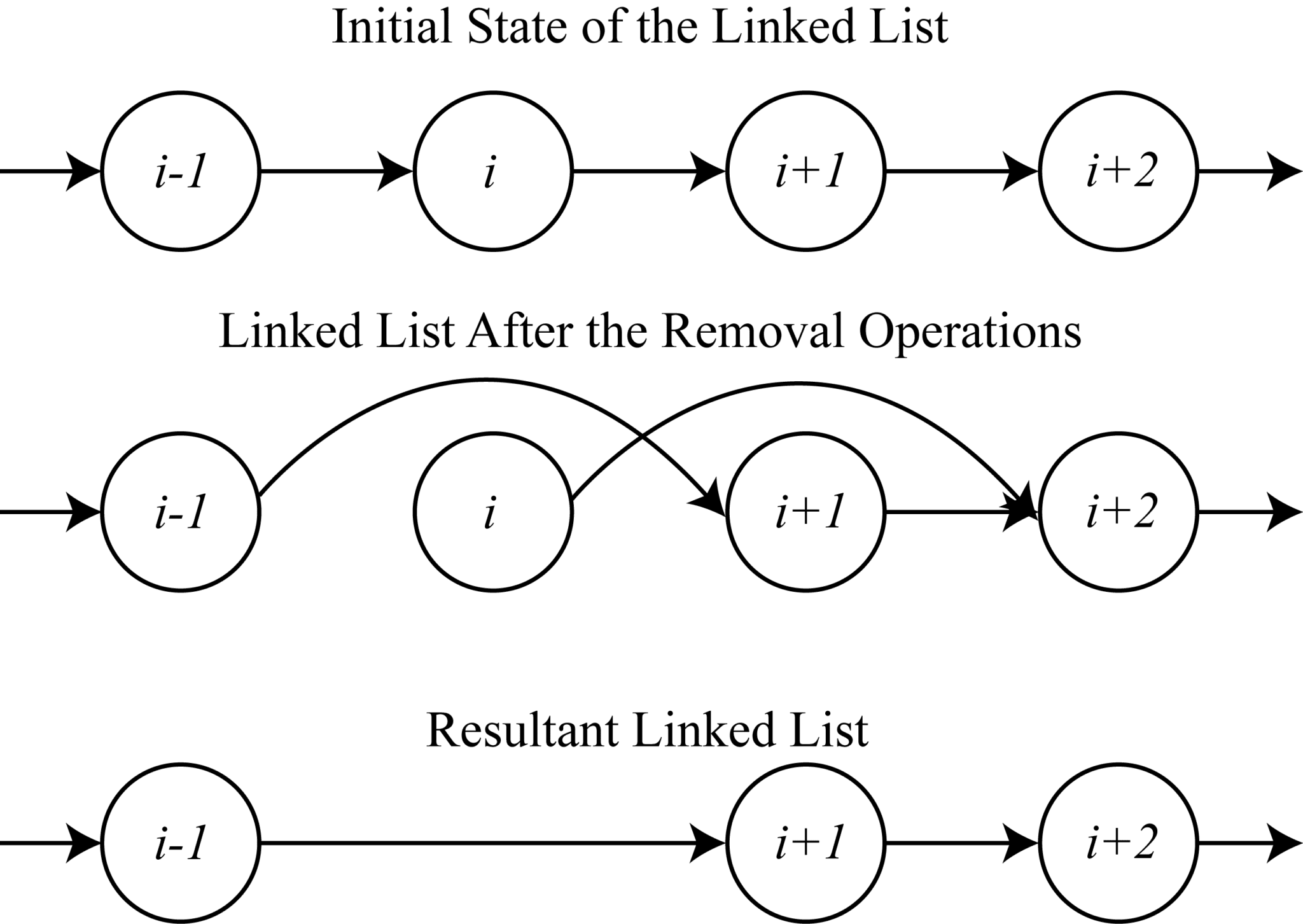
Distributed indexing algorithms
Distributed indexing algorithms are used to store and retrieve data in a distributed database system. They work by creating an index structure that maps keys to the locations of the corresponding data records in the database.
There are several different types of distributed indexing algorithms, including hash-based indexing, range-based indexing, and tree-based indexing. Each of these approaches has its own trade-offs in terms of performance, scalability, and fault tolerance.
Hash-based indexing algorithms use a hash function to map keys to nodes in the system, and data is stored on the nodes responsible for the corresponding keys. This can provide good performance and scalability, but may have lower fault tolerance compared to other approaches.
Range-based indexing algorithms divide the keys into ranges and assign each range to a specific node in the system. This can provide good performance and scalability, but may require more complex management of the key ranges as the system grows or changes.
Tree-based indexing algorithms use a tree structure to store the index information, and can support efficient queries and updates. However, they may have lower scalability and higher overhead compared to other approaches.
Distributed query processing algorithms
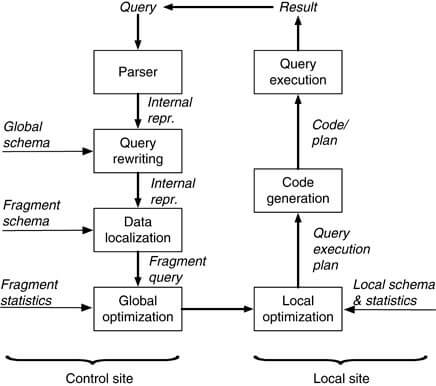
Distributed query processing algorithms are used to execute queries on a distributed database system. They work by dividing the query into subqueries that can be processed by different nodes in the system, and then combining the results of the subqueries to produce the final result.
There are several different approaches to distributed query processing, including divide-and-conquer algorithms, pipelining algorithms, and broadcast algorithms. Each of these approaches has its own trade-offs in terms of performance, scalability, and fault tolerance.
Divide-and-conquer algorithms divide the query into smaller subqueries that can be processed independently, and then combine the results to produce the final result. This can provide good performance and scalability, but may require more complex management of the subqueries.
Pipelining algorithms divide the query into stages, and pass the intermediate results from one stage to the next as the query is processed. This can provide good performance and scalability, but may have higher overhead compared to other approaches.
Broadcast algorithms send the entire query to all nodes in the system, and have each node return the relevant part of the result. This can be simple to implement, but may have lower performance and scalability compared to other approaches.
Distributed transaction processing algorithms
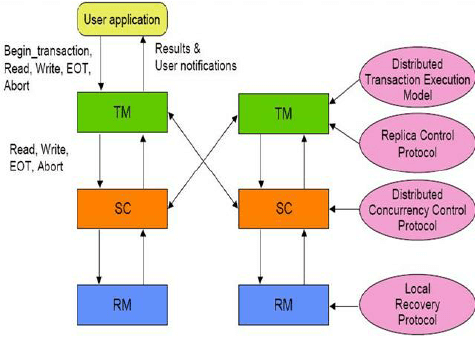
Distributed transaction processing algorithms are used to ensure the consistency and integrity of data in a distributed database system. They work by coordinating the updates to the database made by multiple transactions, in order to ensure that the updates are atomic, consistent, isolated, and durable (ACID).
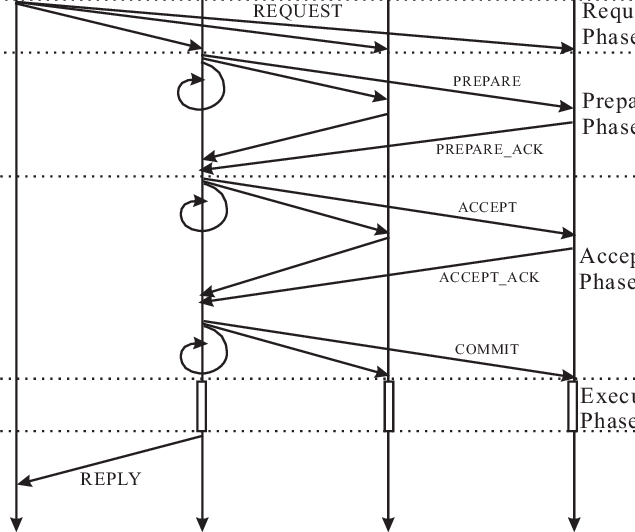
There are several different approaches to distributed transaction processing, including two-phase commit (2PC) and three-phase commit (3PC) algorithms.
Two-phase commit algorithms are used to coordinate the updates made by a single transaction across multiple nodes in the system. They involve a two-phase protocol in which the nodes first prepare to commit the updates, and then either commit or roll back the updates based on the outcome of the transaction. 2PC algorithms can provide good performance and scalability, but may have lower fault tolerance compared to other approaches.
Three-phase commit algorithms are similar to 2PC algorithms, but involve an additional “pre-commit” phase in which the nodes prepare to commit the updates. This can provide higher fault tolerance and better recovery from failures, but may have higher overhead and complexity compared to 2PC algorithms.
Distributed File System Algorithms
Distributed File System (DFS) algorithms are designed to manage files across multiple servers or locations, ensuring efficient storage, retrieval, and consistency of data in a distributed environment. Here are some key algorithms and techniques used in DFS:
-
File Replication: This algorithm involves creating multiple copies of files across different servers to ensure high availability and fault tolerance. If one server fails, the file can still be accessed from another server.
-
File Allocation: This algorithm determines how files are distributed among different servers. Techniques include round-robin, least-used, and random allocation to balance the load and optimize resource utilization.
-
Metadata Management: This involves maintaining information about file locations, sizes, and permissions. Efficient metadata management algorithms ensure quick access to file information without querying all servers.
- Consistency Protocols: Ensures that all copies of a file are synchronized. Common protocols include:
- Two-Phase Commit: Ensures that all participating servers agree on a transaction before it is committed.
- Quorum-Based Protocols: Requires a majority of servers to agree on changes before they are committed, enhancing consistency and reliability.
-
Caching and Prefetching: Algorithms that temporarily store frequently accessed files or predict future file access patterns to reduce latency and improve performance.
-
Fault Tolerance Mechanisms: These algorithms detect and recover from server failures, ensuring that the DFS remains operational. Techniques include checkpointing and rollback recovery.
- Load Balancing: Distributes the workload evenly across servers to prevent any single server from becoming a bottleneck. Algorithms consider current load, network latency, and server capacity.
File allocation algorithms
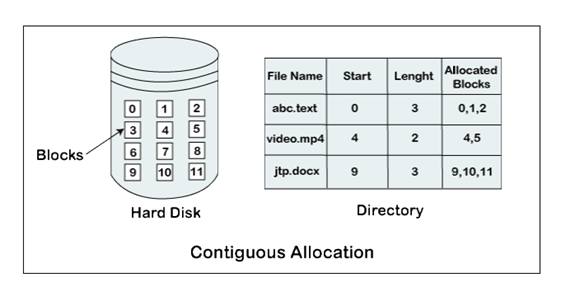
File allocation algorithms are used to determine how files should be distributed among the nodes in a distributed file system. These algorithms can take into account factors such as available storage space, network connectivity, and workload to make efficient allocation decisions.
There are several different types of file allocation algorithms, including:
- Round-robin: In a round-robin file allocation algorithm, files are distributed in a rotating manner among the nodes in the system. This can provide good balance and evenness of workload, but may not take into account other factors such as available storage space or network connectivity.
- Least connections: In a least connections file allocation algorithm, files are distributed to the nodes with the fewest current connections or workload. This can help to ensure that the system is able to handle a high workload without overloading any particular node.
- Least response time: In a least response time file allocation algorithm, files are distributed to the nodes with the lowest average response time for file access requests. This can help to improve the overall performance of the file system.
File distribution algorithms and striping
File distribution algorithms are used to determine how data should be divided into blocks and distributed among the nodes in a distributed file system. These algorithms can take into account factors such as data locality and network topology to optimize data access and transfer performance.
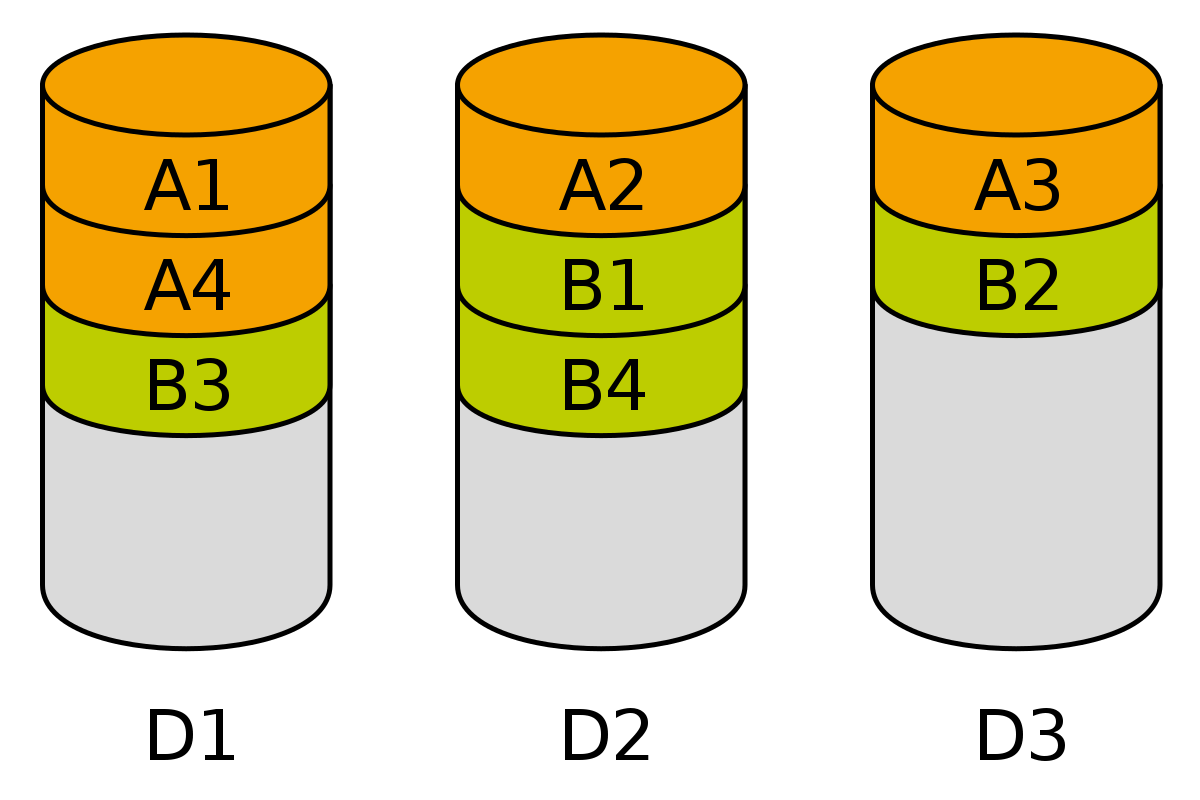
One type of file distribution algorithms we haven’t already mentions aside from Replication and Erasure coding is striping.
In striping, data is divided into blocks and distributed across the nodes in the system in a round-robin manner. This can provide good performance and scalability, but may have lower fault tolerance compared to other approaches.
Synchronization algorithms
Synchronization algorithms are techniques used to coordinate the execution of processes in a distributed or multi-process system, ensuring that shared resources are accessed and modified in a consistent and orderly manner.
Lock-based algorithms
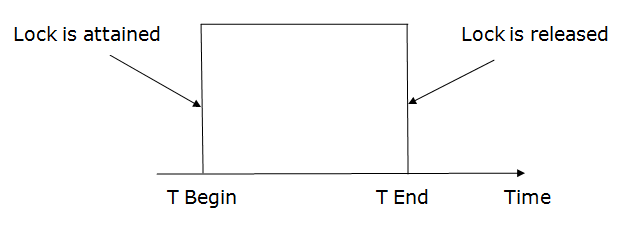
Lock-based algorithms are a type of synchronization algorithm that is used to coordinate the actions of multiple threads or processes in a distributed system. They work by allowing only one thread or process to acquire a lock on a shared resource at a time, and requiring other threads or processes to wait until the lock is released before they can access the resource.
There are several different types of lock-based algorithms, including:
- Mutual exclusion locks: Mutual exclusion locks (also known as mutexes) allow only one thread or process to acquire the lock at a time, and are used to protect shared resources that cannot be accessed concurrently.
- Reader-writer locks: Reader-writer locks allow multiple readers to access a shared resource concurrently, but prevent writers from accessing the resource until all readers have released the lock. This can improve performance for read-heavy workloads.
- Semaphores: Semaphores are a type of lock that allows multiple threads or processes to acquire the lock concurrently, up to a maximum limit. This can be used to limit the number of threads or processes that can access a shared resource at the same time.
### Timestamp-based algorithms
Timestamp-based algorithms are a type of synchronization algorithm that is used to coordinate the actions of multiple threads or processes in a distributed system. They work by assigning a unique timestamp to each thread or process, and using the timestamps to order the access to shared resources.
There are several different types of timestamp-based algorithms, including:
- Lamport timestamps: Lamport timestamps are a type of logical clock that is used to order events in a distributed system. Each node in the system maintains a local clock, and assigns a unique timestamp to each event based on the current value of the clock. The timestamps can be used to determine the order in which events occurred, even if they are processed on different nodes.
- Vector clocks: Vector clocks are a type of logical clock that is used to track the causal dependencies between events in a distributed system. Each node in the system maintains a local clock, and assigns a unique timestamp to each event based on the current value of the clock. The timestamps are stored in a vector, and can be used to determine the order in which events occurred and the causal relationships between them.
- Physical timestamps: Physical timestamps are based on a global clock that is shared among all nodes in the system. Each node assigns a unique timestamp to each event based on the current value of the global clock. Physical timestamps can be used to determine the order in which events occurred, but may be more complex to implement and maintain compared to logical clocks.
Vector clock algorithms
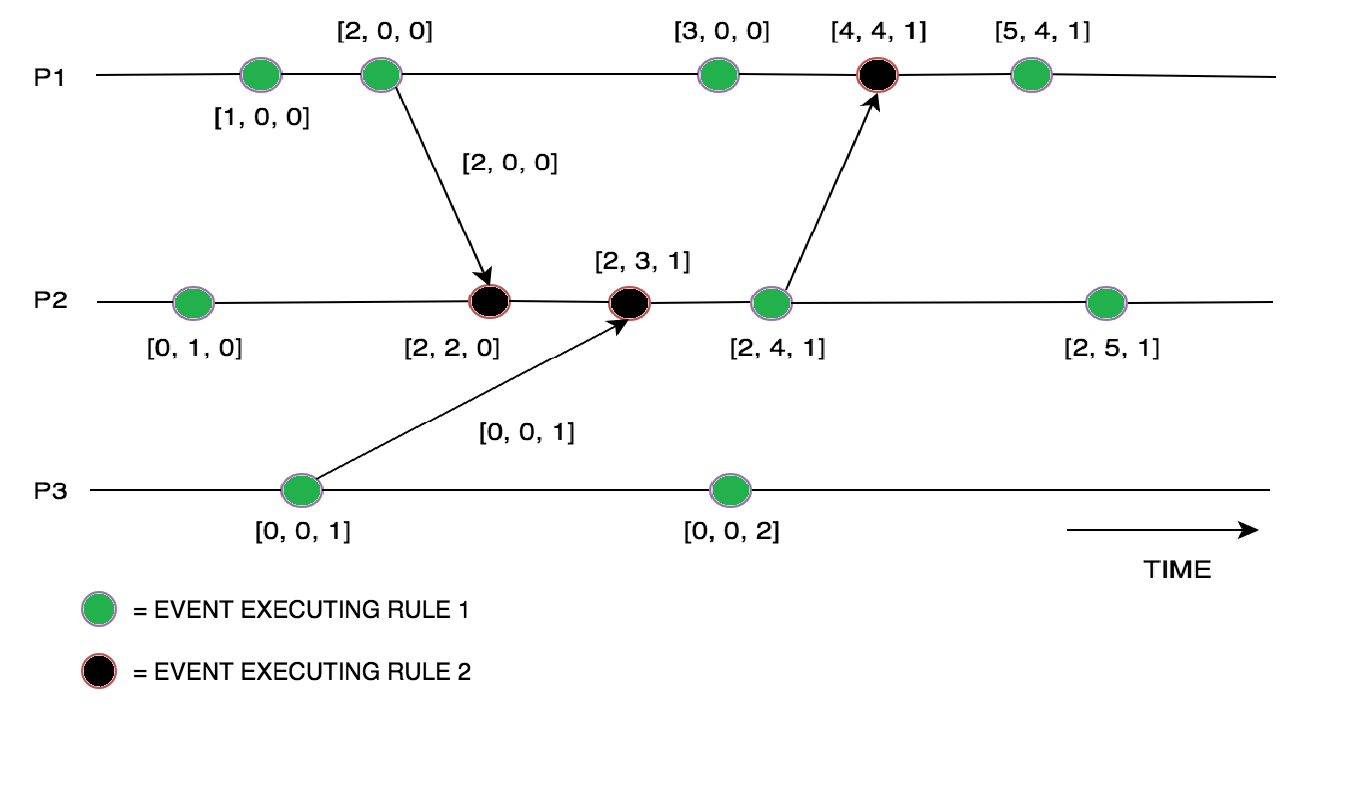
Vector clocks are a type of logical clock that is used to track the causal dependencies between events in a distributed system. Each node in the system maintains a local clock, and assigns a unique timestamp to each event based on the current value of the clock. The timestamps are stored in a vector, and can be used to determine the order in which events occurred and the causal relationships between them.
Vector clocks are often used in distributed systems that need to ensure consistency and detect conflicts between updates made by different nodes. For example, a distributed database may use vector clocks to track the order in which updates are made to different records, and to resolve conflicts when multiple updates are made concurrently.
Vector clocks are similar to Lamport timestamps, which are another type of logical clock used in distributed systems. However, vector clocks can track more complex causal relationships between events, and can be used to determine whether two events are concurrent or causally related.
Coordination algorithms
Coordination algorithms are methods used to manage and synchronize the activities of multiple agents or processes in a distributed system. These algorithms ensure that tasks are completed efficiently and resources are used optimally.
Leader election algorithms
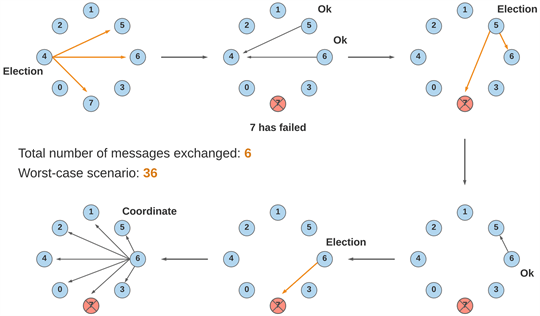
Leader election algorithms are used to select a leader or coordinator from among a group of nodes in a distributed system. The leader is responsible for coordinating the actions of the other nodes, and may be responsible for tasks such as resource allocation, task scheduling, or data management.
There are several different approaches to leader election, including:
- Centralized: In a centralized leader election algorithm, a central node is responsible for selecting the leader from among the other nodes. This can be simple to implement, but may have lower fault tolerance and scalability compared to decentralized approaches.
- Decentralized: In a decentralized leader election algorithm, the nodes in the system work together to select the leader without the need for a central node. There are several different types of decentralized leader election algorithms, including ring-based algorithms, tree-based algorithms, and consensus-based algorithms. Decentralized approaches can be more fault-tolerant and scalable compared to centralized approaches, but may be more complex to implement.
- Self-organizing: In a self-organizing leader election algorithm, the nodes in the system automatically select the leader based on local rules and interactions. This can be simple to implement, but may have lower fault tolerance and scalability compared to other approaches.
Clock synchronization algorithm
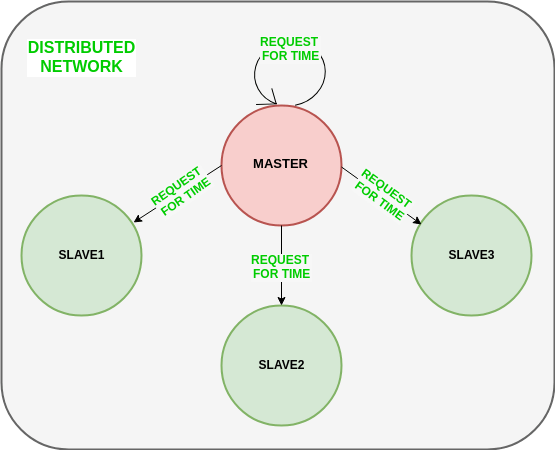
Clock synchronization algorithms are used to ensure that the clocks on different nodes in a distributed system are kept in sync with each other. This is important for many applications, as the correct order of events and the duration of events may depend on the accuracy of the clocks.
There are several different approaches to clock synchronization, including:
- Centralized: In a centralized clock synchronization algorithm, a central node is responsible for maintaining the correct time and sending updates to the other nodes in the system. This can be simple to implement, but may have lower fault tolerance and scalability compared to decentralized approaches.
- Decentralized: In a decentralized clock synchronization algorithm, the nodes in the system work together to maintain the correct time without the need for a central node. There are several different types of decentralized clock synchronization algorithms, including message-based algorithms and network-based algorithms. Decentralized approaches can be more fault-tolerant and scalable compared to centralized approaches, but may be more complex to implement.
- Self-organizing: In a self-organizing clock synchronization algorithm, the nodes in the system automatically adjust their clocks based on local rules and interactions. This can be simple to implement, but may have lower accuracy and stability compared to other approaches.
Distributed mutual exclusion algorithms
Distributed mutual exclusion algorithms are used to coordinate the access to shared resources in a distributed system. They work by allowing only one node in the system to acquire a lock on the shared resource at a time, and requiring other nodes to wait until the lock is released before they can access the resource.
There are several different approaches to distributed mutual exclusion, including:
- Token-based: In a token-based mutual exclusion algorithm, a special “token” is passed between the nodes in the system, and the node that holds the token has the right to access the shared resource. This can be simple to implement, but may have lower fault tolerance and scalability compared to other approaches.
- Message-based: In a message-based mutual exclusion algorithm, the nodes in the system communicate with each other using messages to request and release locks on the shared resource. This can be more fault-tolerant and scalable compared to token-based approaches, but may have higher overhead and complexity.
- Time-based: In a time-based mutual exclusion algorithm, the nodes in the system agree on a schedule for accessing the shared resource, and only allow access to the resource at predetermined times. This can be simple to implement, but may have lower fault tolerance and scalability compared to other approaches.
Resource management algorithms
Resource management algorithms are designed to efficiently allocate and manage computing resources in distributed systems, cloud environments, and other large-scale computing infrastructures. These algorithms aim to optimize various performance metrics such as load balancing, resource utilization, and system throughput.
Load balancing algorithms
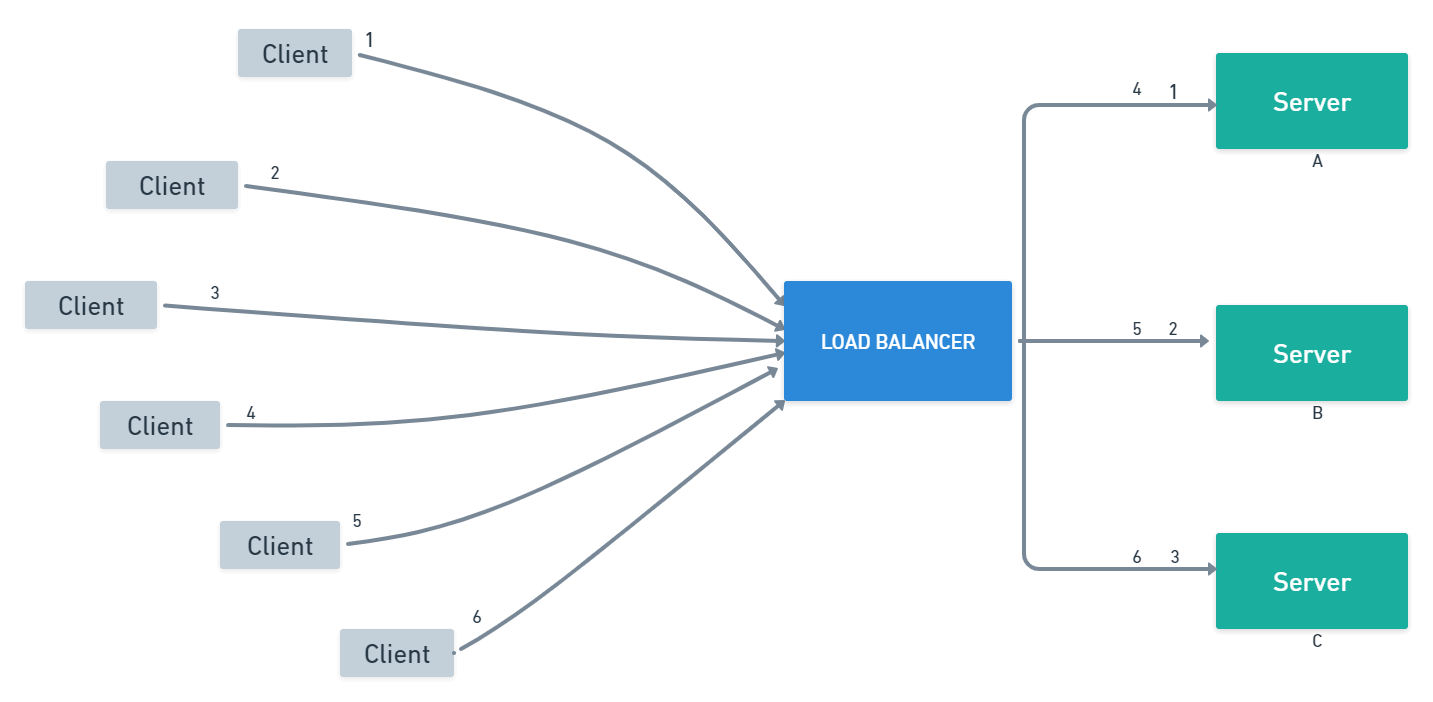
Load balancing algorithms are used to distribute workload evenly among the nodes in a distributed system, in order to improve system performance and scalability. These algorithms can take into account factors such as the current workload and capacity of each node, as well as network latency and other performance metrics, to make efficient allocation decisions.
There are several different types of load balancing algorithms, including:
- Round-robin: In a round-robin load balancing algorithm, workload is distributed in a rotating manner among the nodes in the system. This can provide good balance and evenness of workload, but may not take into account other factors such as available resources or network connectivity.
- Least connections: In a least connections load balancing algorithm, workload is distributed to the nodes with the fewest current connections or workload. This can help to ensure that the system is able to handle a high workload without overloading any particular node.
- Least response time: In a least response time load balancing algorithm, workload is distributed to the nodes with the lowest average response time for requests. This can help to improve the overall performance of the system.
- Weighted round-robin: In a weighted round-robin load balancing algorithm, the nodes in the system are assigned different weights, and workload is distributed in proportion to the weights. This can be used to prioritize certain nodes or resources, or to balance the workload more evenly.
Scheduling algorithms
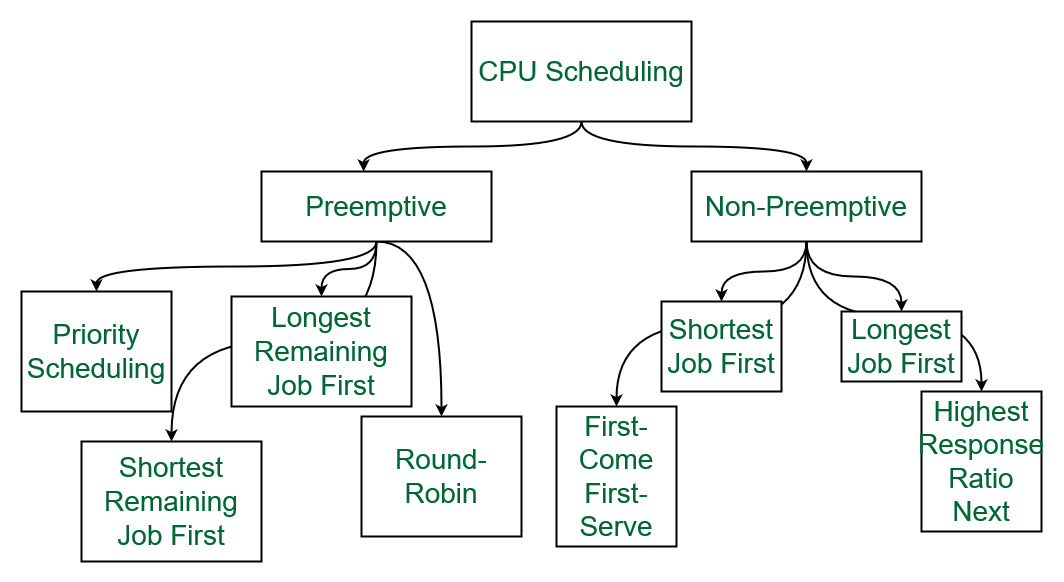
Scheduling algorithms are used to determine the order in which tasks should be executed in a distributed system. These algorithms can take into account factors such as task dependencies, resource availability, and performance goals to make efficient scheduling decisions.
There are several different types of scheduling algorithms, including:
- First-come, first-served (FCFS): In a first-come, first-served scheduling algorithm, tasks are executed in the order in which they are received. This can be simple to implement, but may not take into account other factors such as task dependencies or resource availability.
- Shortest job first (SJF): In a shortest job first scheduling algorithm, tasks are executed in order of their estimated execution time, with shorter tasks being given priority. This can improve overall system performance, but may be less fair to longer-running tasks.
- Round-robin: In a round-robin scheduling algorithm, tasks are assigned to nodes in a rotating manner. This can provide good balance and evenness of workload, but may not take into account other factors such as task dependencies or resource availability.
- Priority: In a priority scheduling algorithm, tasks are assigned a priority level, and tasks with higher priority are given preference over tasks with lower priority. This can be used to ensure that important tasks are executed promptly, but may be less fair to lower-priority tasks.
Optimization algorithms
Optimization algorithms are a class of algorithms that are used to find the optimal solution to a problem, given certain constraints. These algorithms are widely used in a variety of fields, including engineering, finance, and machine learning, to solve problems such as resource allocation, portfolio optimization, and model selection.
There are several different types of optimization algorithms, including:
- Linear programming: Linear programming algorithms are used to find the optimal solution to a problem with linear constraints and objectives. These algorithms are used in a variety of applications, including resource allocation, portfolio optimization, and scheduling.
- Nonlinear programming: Nonlinear programming algorithms are used to find the optimal solution to a problem with nonlinear constraints and objectives. These algorithms are used in a variety of applications, including machine learning, engineering design, and finance.
- Genetic algorithms: Genetic algorithms are a type of optimization algorithm that is inspired by the process of natural selection. These algorithms use a population of potential solutions that evolves over time through the application of genetic operators such as crossover and mutation. Genetic algorithms are used in a variety of applications, including machine learning and engineering design.
- Gradient descent: Gradient descent is a type of optimization algorithm that is used to find the minimum of a function. It works by starting at a random point and iteratively moving in the direction of the negative gradient of the function, until it reaches a local minimum. Gradient descent is commonly used in machine learning to optimize the parameters of a model.
Communication protocols
Communication protocols are formal sets of rules and conventions that govern the exchange of data between devices over a network. These protocols ensure that data is transmitted accurately, reliably, and securely.
### Message passing protocols
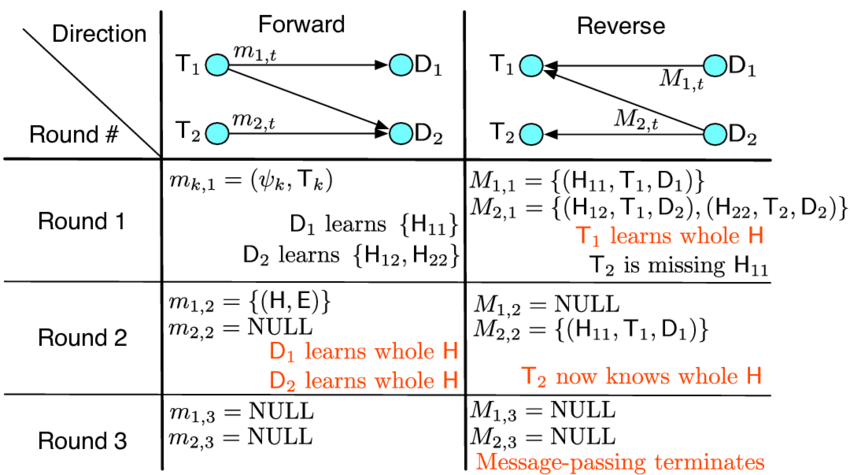
Message passing protocols are communication protocols that are used to facilitate the exchange of messages or data between two or more devices over a network. In a message passing protocol, devices can send messages or data to each other directly, rather than going through a central server as in a publish-subscribe protocol.
There are many different types of message passing protocols, including:
- TCP: The Transmission Control Protocol (TCP) is a reliable, connection-oriented message passing protocol that is widely used on the Internet. In TCP, devices establish a connection with each other and then exchange messages or data over the connection.
- UDP: The User Datagram Protocol (UDP) is a connectionless, unreliable message passing protocol that is commonly used for real-time applications such as audio and video streaming. In UDP, devices send messages or data to each other without establishing a connection, and the protocol does not guarantee that the messages will be delivered.
- MPI: The Message Passing Interface (MPI) is a message passing protocol that is used to facilitate communication between processes in a distributed system. MPI provides a standard set of functions that can be used to send and receive messages between processes, and is widely used in scientific computing and high-performance computing applications.
- RMI: The Remote Method Invocation (RMI) protocol is a message passing protocol that is used to facilitate communication between Java applications. RMI allows one Java application to invoke methods on another Java application over a network, and is commonly used in distributed systems.
Request-response
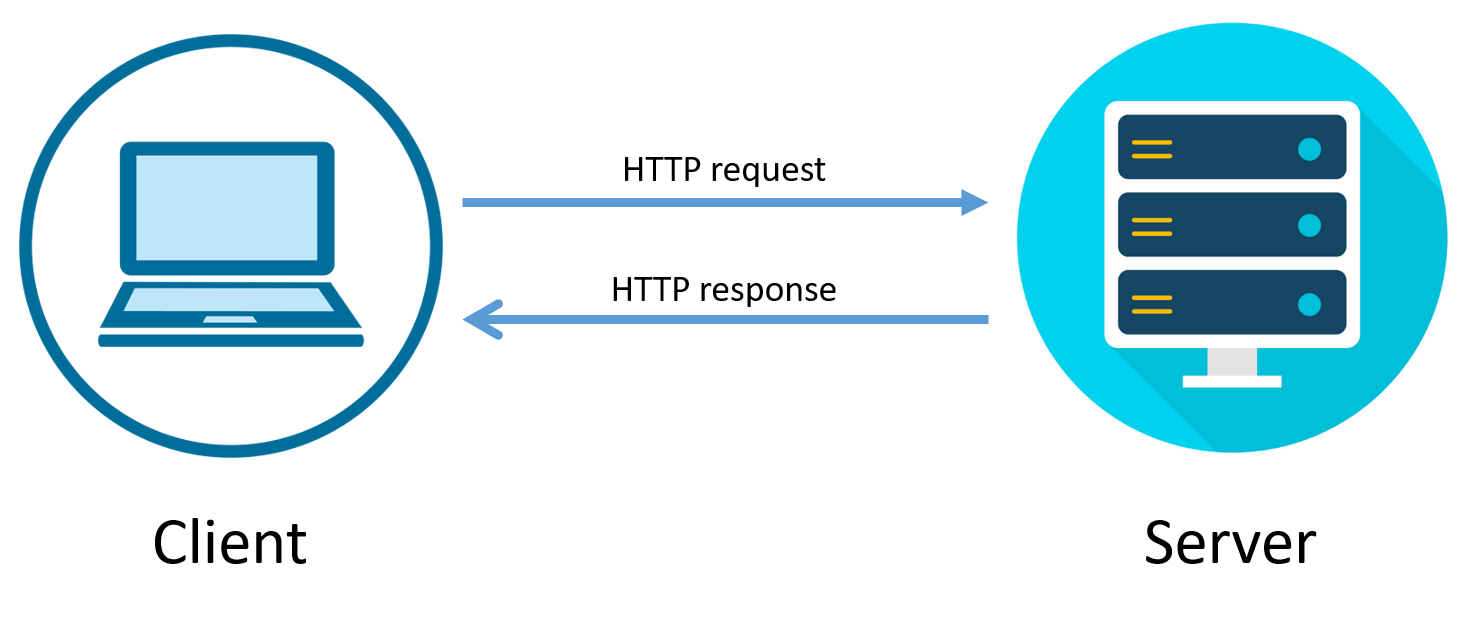
Request-response protocols are communication protocols that are used to facilitate the exchange of information between two or more devices over a network. In a request-response protocol, one device (the client) sends a request for information to another device (the server), and the server responds with the requested information.
There are many different types of request-response protocols, including:
- HTTP: The Hypertext Transfer Protocol (HTTP) is a request-response protocol that is used to exchange information over the World Wide Web. In HTTP, a client sends a request to a server, and the server responds with the requested information.
- FTP: The File Transfer Protocol (FTP) is a request-response protocol that is used to exchange files over a network. In FTP, a client sends a request to a server to download or upload a file, and the server responds with the requested file or the status of the transfer.
- SMTP: The Simple Mail Transfer Protocol (SMTP) is a request-response protocol that is used to exchange email over a network. In SMTP, a client sends a request to a server to send an email, and the server responds with the status of the request.
- DNS: The Domain Name System (DNS) is a request-response protocol that is used to translate human-readable domain names into numerical IP addresses. In DNS, a client sends a request to a server to resolve a domain name, and the server responds with the corresponding IP address.
Publish-subscribe protocols
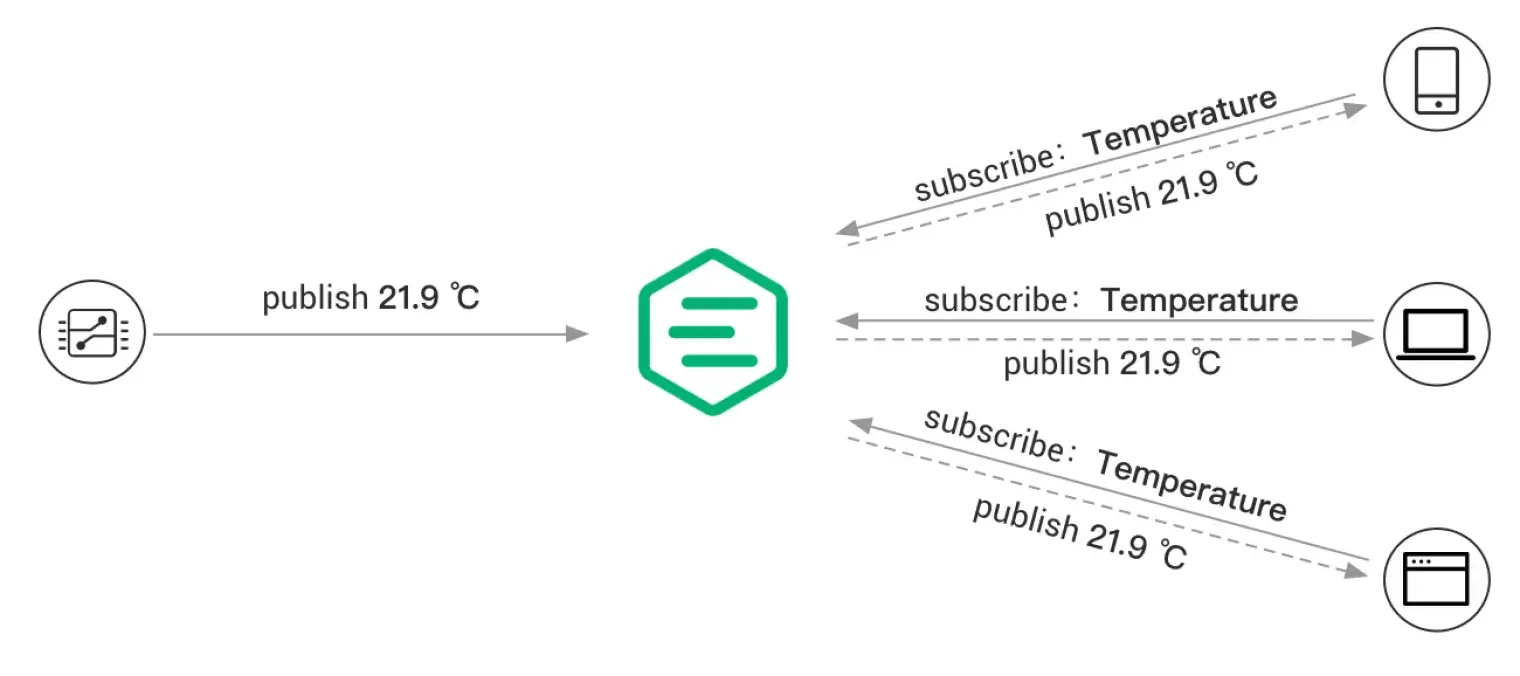
Publish-subscribe protocols are communication protocols that are used to facilitate the exchange of information between two or more devices over a network. In a publish-subscribe protocol, one or more devices (publishers) send messages or data to a central server (the broker), and other devices (subscribers) receive the messages or data by subscribing to the broker.
There are many different types of publish-subscribe protocols, including:
- MQTT: The Message Queue Telemetry Transport (MQTT) is a publish-subscribe protocol that is designed for use in low-bandwidth, high-latency networks. In MQTT, publishers send messages to the broker, and subscribers receive the messages by subscribing to the broker.
- STOMP: The Simple/Streaming Text Oriented Messaging Protocol (STOMP) is a publish-subscribe protocol that is used to exchange messages between client and server over a network. In STOMP, publishers send messages to the broker, and subscribers receive the messages by subscribing to the broker.
- AMQP: The Advanced Message Queuing Protocol (AMQP) is a publish-subscribe protocol that is used to exchange messages between client and server over a network. In AMQP, publishers send messages to the broker, and subscribers receive the messages by subscribing to the broker.
- XMPP: The Extensible Messaging and Presence Protocol (XMPP) is a publish-subscribe protocol that is used to exchange messages and presence information between client and server over a network. In XMPP, publishers send messages to the broker, and subscribers receive the messages by subscribing to the broker.
Network Routing Algorithms
Network routing algorithms are essential software programs used to determine the most efficient path for data packets to travel from a source to a destination within a network. These algorithms help in managing and directing data traffic efficiently, ensuring optimal network performance and reliability.
### Shortest path algorithms
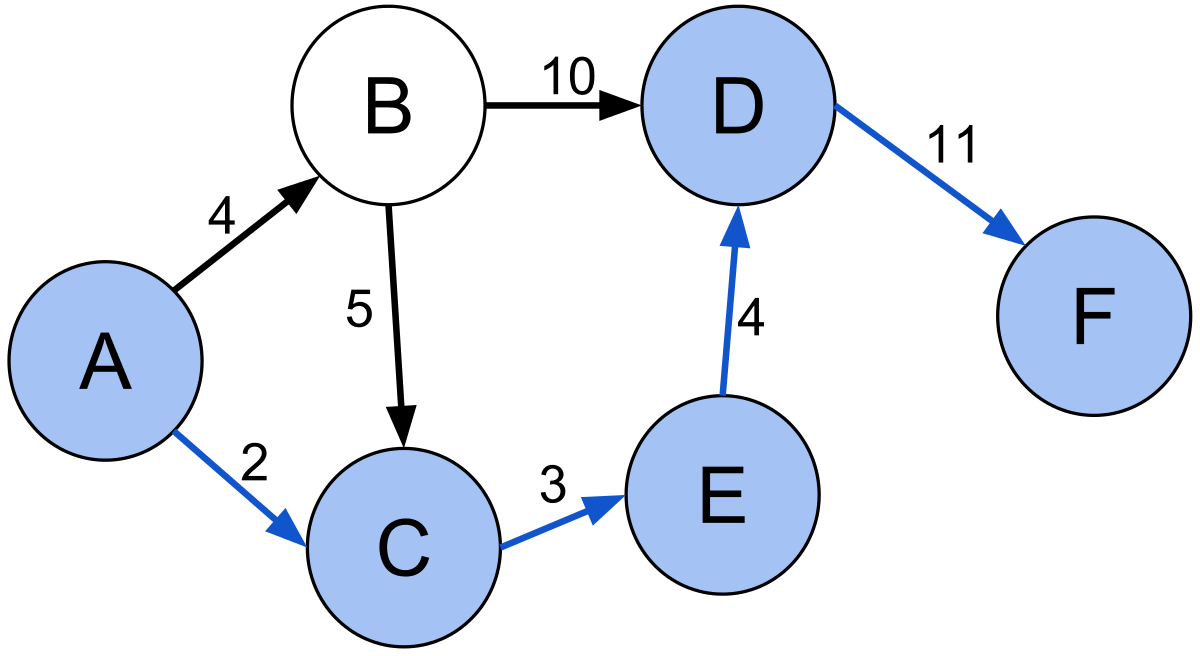
Shortest path algorithms are a class of algorithms that are used to find the shortest path between two nodes in a graph. These algorithms are widely used in a variety of fields, including computer science, transportation planning, and geographic information systems, to solve problems such as routing, navigation, and network design.
There are several different types of shortest path algorithms, including:
- Dijkstra’s algorithm: Dijkstra’s algorithm is an algorithm for finding the shortest path between two nodes in a graph with non-negative edge weights. It works by iteratively relaxing the distances to the destination node and updating the shortest path to each node along the way.
- A* search algorithm: The A* search algorithm is an algorithm for finding the shortest path between two nodes in a graph. It works by using an estimated cost function to guide the search and prioritize nodes that are likely to be on the shortest path.
- Bellman-Ford algorithm: The Bellman-Ford algorithm is an algorithm for finding the shortest path between two nodes in a graph with negative edge weights. It works by iteratively relaxing the distances to the destination node and updating the shortest path to each node along the way.
- Floyd-Warshall algorithm: The Floyd-Warshall algorithm is an algorithm for finding the shortest path between all pairs of nodes in a graph. It works by iteratively relaxing the distances between each pair of nodes and updating the shortest path between them.
### Minimum hop algorithms
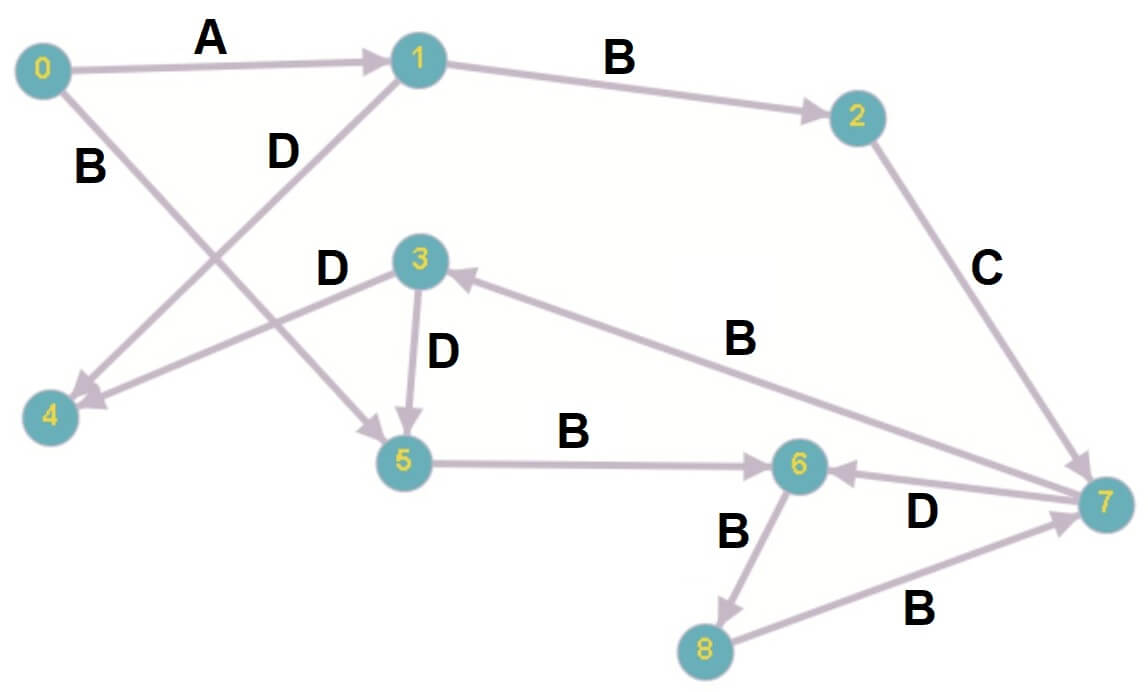
Minimum hop algorithms are a class of algorithms that are used to find the shortest path between two nodes in a graph in terms of the number of hops (edges) that must be traversed. These algorithms are commonly used in networking applications to find the route with the fewest number of intermediate routers or switches between two nodes on a network.
There are several different types of minimum hop algorithms, including:
- Dijkstra’s algorithm: Dijkstra’s algorithm is an algorithm for finding the shortest path between two nodes in a graph with non-negative edge weights. It can be modified to find the minimum hop path by setting all edge weights to 1, regardless of their actual weight.
- Breadth-first search: Breadth-first search is an algorithm for traversing a graph in which nodes are visited in the order of their distance from the source node. This can be used to find the minimum hop path between two nodes by stopping the search once the destination node is reached.
- Depth-first search: Depth-first search is an algorithm for traversing a graph in which nodes are visited in a depth-first manner, meaning that nodes are fully explored before moving on to the next node. This can also be used to find the minimum hop path between two nodes by stopping the search once the destination node is reached.
Load-balanced routing algorithms
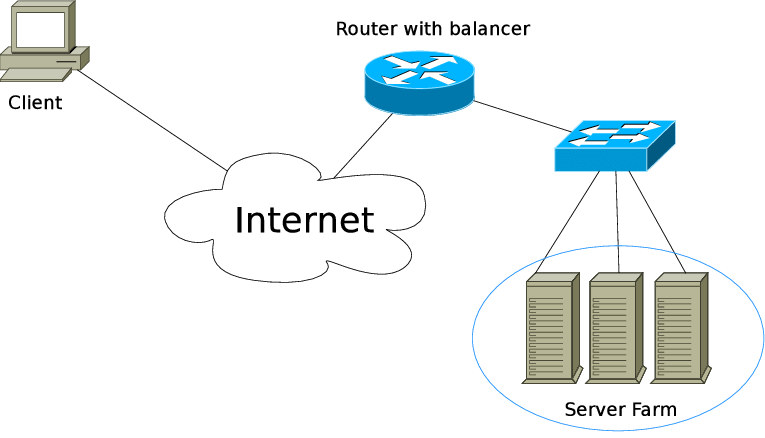
Load-balanced routing algorithms are a class of algorithms that are used to distribute traffic across multiple routes or servers in order to balance the load and improve performance. These algorithms are commonly used in networking and distributed systems to optimize the use of resources and prevent bottlenecks.
There are several different types of load-balanced routing algorithms, including:
- Round-robin: In the round-robin algorithm, traffic is distributed evenly across multiple routes or servers by rotating through them in a fixed order. This ensures that each route or server receives an equal share of the traffic.
- Least connection: In the least connection algorithm, traffic is directed to the route or server with the fewest active connections. This helps to balance the load and prevent any one route or server from becoming overloaded.
- Weighted round-robin: In the weighted round-robin algorithm, each route or server is assigned a weight that determines the proportion of traffic that it should receive. This allows for more fine-grained control over the distribution of traffic.
- Hash-based: In hash-based algorithms, traffic is directed to a particular route or server based on a hash of the request or connection. This helps to evenly distribute the traffic across the available routes or servers.
Conclusion
Algorithms play a crucial role in distributed systems, helping to solve a wide range of problems involving data distribution, resource management, and communication. There are many different types of algorithms used in distributed systems, including data distribution algorithms, resource management algorithms, and distributed file system algorithms, as well as more specialized algorithms such as consistent hashing, replication algorithms, erasure coding, and gossip protocols. These algorithms are an essential part of the infrastructure of distributed systems, and help to ensure that these systems are efficient, scalable, and reliable.
🌐 Sources
Distributed Systems
- “The Byzantine Generals Problem” - Leslie Lamport, Robert Shostak, and Marshall Pease (1982)
- “A Note on Distributed Computing” - Jim Gray (1985)
- “System Support for Scalable and Fault Tolerant Internet Services” - Armando Fox, Eric A. Brewer (1999)
Data Distribution Algorithms
- “Churn-Resistant Peer-to-Peer Streaming” - Christos Gkantsidis, Milena Mihail, Amin Saberi (2005)
- “Efficient Data Propagation in Peer-to-Peer Networks” - Shafiq Alam, Judy Kay, Jie Lu (2004)
Erasure Coding
- “A Survey of Erasure Coding Techniques for Distributed Storage” - E. L. Miller, W. E. Freeman (2010)
- “Erasure Codes for Storage Applications” - K. Greenan, E. L. Miller, T. J. E. Schwarz (2010)
Replication
- “Practical Byzantine Fault Tolerance” - Miguel Castro, Barbara Liskov (1999)
- “The Google File System” - Sanjay Ghemawat, Howard Gobioff, Shun-Tak Leung (2003)
Distributed Hash Tables (DHTs)
- “Chord: A Scalable Peer-to-Peer Lookup Protocol for Internet Applications” - Ion Stoica, Robert Morris, David Karger, M. Frans Kaashoek, Hari Balakrishnan (2001)
- “CAN: A Scalable Content-Addressable Network” - Sylvia Ratnasamy, Paul Francis, Mark Handley, Richard Karp, Scott Shenker (2001)
Consensus Protocols
Paxos Algorithms
- “Paxos Made Simple” - Leslie Lamport (2001)
- “The Part-Time Parliament” - Leslie Lamport (1998)
Raft Algorithm
- “In Search of an Understandable Consensus Algorithm” - Diego Ongaro, John Ousterhout (2014)
Byzantine Fault Tolerance (BFT) Protocols
- “Practical Byzantine Fault Tolerance” - Miguel Castro, Barbara Liskov (1999)
- “BFT: The Time and Place for Building Robust Distributed Systems” - Lidong Zhou, Fred B. Schneider, Robbert van Renesse (2002)
Fault Tolerance Algorithms
Checkpointing
- “Checkpointing in Distributed Systems” - Lorenzo Alvisi, Keith Marzullo (1998)
Rollback Algorithms
- “Timewarp: A Parallel, Distributed System for the Simulation of Time Warp” - David Jefferson, Brian Beckman, Frederic Wieland (1987)
Distributed Database Algorithms
Distributed Indexing Algorithms
- “The Case for a Hybrid Indexing Scheme in Distributed Storage Systems” - Swaminathan Sundararaman, Nisha Talagala, Andrea C. Arpaci-Dusseau, Remzi H. Arpaci-Dusseau (2010)
Distributed Query Processing Algorithms
- “Query Processing in a System for Distributed Databases (SDD-1)” - Michael Stonebraker, Eugene Wong, Peter Kreps, Gerald Held (1976)
Distributed Transaction Processing Algorithms
- “Distributed Transactions: Consistency, Availability, and Concurrency” - Henry F. Korth, Abraham Silberschatz (1991)
Distributed File System Algorithms
- “The Google File System” - Sanjay Ghemawat, Howard Gobioff, Shun-Tak Leung (2003)
- “Farsite: Federated, Available, and Reliable Storage for an Incompletely Trusted Environment” - Atul Adya, William J. Bolosky, Miguel Castro, Gerald Cermak, Ronnie Chaiken, John R. Douceur, Jon Howell, Jacob R. Lorch, Marvin Theimer, Roger P. Wattenhofer (2002)
Synchronization Algorithms
Lock-based Algorithms
- “On the Performance of Mutual Exclusion in Distributed Systems” - M. Singhal (1989)
Timestamp-based Algorithms
- “Time, Clocks, and the Ordering of Events in a Distributed System” - Leslie Lamport (1978)
Vector Clock Algorithms
- “Efficient Detection of Global Properties in Distributed Systems: Iterative Algorithms” - Keith Marzullo, Gerard Tel (1988)
Coordination Algorithms
Leader Election Algorithms
- “Leader Election in Asynchronous Distributed Systems” - Michael J. Fischer, Nancy A. Lynch, Michael S. Paterson (1985)
Clock Synchronization Algorithm
- “Clock Synchronization in Distributed Systems” - Keith Marzullo, Shmuel Schwartz (1989)
Distributed Mutual Exclusion Algorithms
- “A Survey of Distributed Mutual Exclusion Algorithms” - Michel Raynal (2013)
Resource Management Algorithms
Load Balancing Algorithms
- “A Study of Dynamic Load Balancing in Distributed Systems” - G. Cybenko (1989)
Scheduling Algorithms
- “Job Scheduling Strategies for Parallel Processing” - Dror G. Feitelson, Larry Rudolph (1995)
Optimization Algorithms
- “A Survey of Optimization Techniques for Radio Resource Management in Wireless Networks” - P. P. Bhattacharya, T. T. Jayanthy (2011)
Communication Protocols
Message Passing Protocols
- “A High Performance Messaging System” - Graham E. Fagg, Anthony Skjellum (1995)
Request-response
- “The Design of a High-Performance Distributed File System” - John H. Howard (1988)
Publish-subscribe Protocols
- “The Design and Implementation of a Next Generation Name Service for the Internet” - B. W. Lampson, M. E. Sturgis, D. D. Redell (1985)
Network Routing Algorithms
Shortest Path Algorithms
- “A Fast Algorithm for Shortest Paths in Sparse Networks” - David Eppstein (1998)
Minimum Hop Algorithms
- “On Shortest Paths and Fastest Routes in Time-Dependent Road Networks” - George N. Koutsoupias (1999)
Load-balanced Routing Algorithms
- “Load Balancing in Distributed Systems: A Case Study” - K. Hwang, H. Jin (1998)

{kind=link}